



国产精品免费视频网站丨日韩a毛片免费观看丨欧美日韩中文在线不卡丨欧亚精品乱码久久久久久丨1000部夫妻午夜免费丨国产精品久久久久久久久一级无码丨日欧片内射AV影院频道丨97色伦图片 FX3U-1PG三菱PLC定位模塊的1速定位
国产精品免费视频网站丨日韩a毛片免费观看丨欧美日韩中文在线不卡丨欧亚精品乱码久久久久久丨1000部夫妻午夜免费丨国产精品久久久久久久久一级无码丨日欧片内射AV影院频道丨97色伦图片 FX3U-1PG三菱PLC定位模塊的1速定位
時間:2016-03-29 來源:未知 作者:admin 點擊:5135次
FX3U-1PG三菱PLC定位模塊的1速定位運行概述如下
通過1速定位運行開始指令,以運行速度Ⅰ運行,在目標地址Ⅰ減速停止。
1. 動作
1) 設定運行速度Ⅰ、目標地址Ⅰ。
2) 將運行指令的1速定位運行開始從OFF變成ON后,以運行速度Ⅰ開始1速定位運行。(定位結束標志位被置為OFF。)
3) 在目標地址Ⅰ減速停止,將定位結束標志位置為ON后結束運行。
http://cypssb.com/upload/201603/250910536394.png
注意:移動量為0時,即便將1速定位運行開始置為ON,也不進行定位運行。此外,定位結束標志位也不發生變化。READY僅一瞬間置為OFF。
2. 地址指定
可指定絕對地址和相對地址。
指定絕對地址時:指定距離地址0的位置。
指定相對地址時:指定距離當前地址的移動量。
3. 旋轉方向
指定絕對地址時:
旋轉方向根據當前地址和目標地址Ⅰ的大小關系確定。
- 當前地址<目標地址Ⅰ:正轉
- 當前地址>目標地址Ⅰ:反轉
指定相對地址時:
旋轉方向根據目標地址Ⅰ的符號(正/負)確定。
- 目標地址Ⅰ>0:正轉
- 目標地址Ⅰ<0:反轉
4. 定位結束標志位
運行開始時定位結束標志位置為OFF。
到達目標地址時,定位結束標志位置為ON。
┌────────────┬──────────────┐
│BFM編號 │設定項目 │
├─────┬──────┤ │
│定位參數 │擴展定位參數│ │
├─────┼──────┼──────────────┤
│#0 │#34, #33 │脈沖速率 │
├─────┼──────┼──────────────┤
│#2, #1 │#36. #35 │進給速率 │
├─────┼──────┼─────┬────────┤
│#3 bl, bO │#37 bl, bO │ │單位系統 │
├─────┼──────┤ ├────────┤
│#3 b5, b4 │#37 b5, b4 │ │位置數據倍率 │
├─────┼──────┤ ├────────┤
│#3 b6 │#37 b6 │ │加減速模式 │
├─────┼──────┤ ├────────┤
│#3 b8 │#37 b8 │ │脈沖輸出形式 │
├─────┼──────┤ 運行參數 ├────────┤
│#3 b9 │#37 b9 │ │旋轉方向 │
├─────┼──────┤ ├────────┤
│#3 bll │#37 bll │ │極限減速模式 │
├─────┼──────┤ ├────────┤
│#3 b14 │#37 b14 │ │STOP輸入極性 │
├─────┼──────┤ ├────────┤
│#3 b15 │#37 b15 │ │STOP輸入模式 │
├─────┼──────┼─────┴────────┤
│#5, #4 │#39. #38 │最高速度 │
├─────┼──────┼──────────────┤
│#6 │#41. #40 │基底速度 │
├─────┼──────┼──────────────┤
│#15 │ - │加減速時間 │
├─────┼──────┼──────────────┤
│ - │#51 │加速時間 │
├─────┼──────┼──────────────┤
│ - │#52 │減速時間 │
├─────┴──────┼──────────────┤
│#16 │啟動延遲時間 │
├────────────┼──────────────┤
│#18, #17 │目標地址Ⅰ │
├────────────┼──────────────┤
│#20. #19 │運行速度Ⅰ │
├────────────┼─────┬────────┤
│#25 b8 │運行指令 │1速定位運行開始 │
├────────────┼─────┴────────┤
│#54, #53 │目標地址變更值 │
├────────────┼──────────────┤
│#56, #55 │運行速度變更值 │
└────────────┴──────────────┘
===================1速定位運行時的注意事項===================
向目標位置的移動量較小時的動作
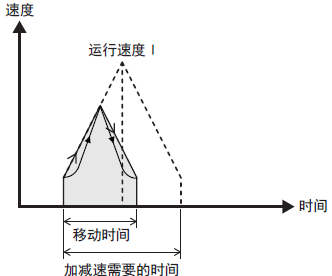
移動量(目標地址Ⅰ)所需時間比加減速需要的時間短時,實際運行速度不會達到運行速度Ⅰ。
通過1速定位運行開始指令,以運行速度Ⅰ運行,在目標地址Ⅰ減速停止。
1. 動作
1) 設定運行速度Ⅰ、目標地址Ⅰ。
2) 將運行指令的1速定位運行開始從OFF變成ON后,以運行速度Ⅰ開始1速定位運行。(定位結束標志位被置為OFF。)
3) 在目標地址Ⅰ減速停止,將定位結束標志位置為ON后結束運行。
http://cypssb.com/upload/201603/250910536394.png
注意:移動量為0時,即便將1速定位運行開始置為ON,也不進行定位運行。此外,定位結束標志位也不發生變化。READY僅一瞬間置為OFF。
2. 地址指定
可指定絕對地址和相對地址。
指定絕對地址時:指定距離地址0的位置。
指定相對地址時:指定距離當前地址的移動量。
3. 旋轉方向
指定絕對地址時:
旋轉方向根據當前地址和目標地址Ⅰ的大小關系確定。
- 當前地址<目標地址Ⅰ:正轉
- 當前地址>目標地址Ⅰ:反轉
指定相對地址時:
旋轉方向根據目標地址Ⅰ的符號(正/負)確定。
- 目標地址Ⅰ>0:正轉
- 目標地址Ⅰ<0:反轉
4. 定位結束標志位
運行開始時定位結束標志位置為OFF。
到達目標地址時,定位結束標志位置為ON。
┌────────────┬──────────────┐
│BFM編號 │設定項目 │
├─────┬──────┤ │
│定位參數 │擴展定位參數│ │
├─────┼──────┼──────────────┤
│#0 │#34, #33 │脈沖速率 │
├─────┼──────┼──────────────┤
│#2, #1 │#36. #35 │進給速率 │
├─────┼──────┼─────┬────────┤
│#3 bl, bO │#37 bl, bO │ │單位系統 │
├─────┼──────┤ ├────────┤
│#3 b5, b4 │#37 b5, b4 │ │位置數據倍率 │
├─────┼──────┤ ├────────┤
│#3 b6 │#37 b6 │ │加減速模式 │
├─────┼──────┤ ├────────┤
│#3 b8 │#37 b8 │ │脈沖輸出形式 │
├─────┼──────┤ 運行參數 ├────────┤
│#3 b9 │#37 b9 │ │旋轉方向 │
├─────┼──────┤ ├────────┤
│#3 bll │#37 bll │ │極限減速模式 │
├─────┼──────┤ ├────────┤
│#3 b14 │#37 b14 │ │STOP輸入極性 │
├─────┼──────┤ ├────────┤
│#3 b15 │#37 b15 │ │STOP輸入模式 │
├─────┼──────┼─────┴────────┤
│#5, #4 │#39. #38 │最高速度 │
├─────┼──────┼──────────────┤
│#6 │#41. #40 │基底速度 │
├─────┼──────┼──────────────┤
│#15 │ - │加減速時間 │
├─────┼──────┼──────────────┤
│ - │#51 │加速時間 │
├─────┼──────┼──────────────┤
│ - │#52 │減速時間 │
├─────┴──────┼──────────────┤
│#16 │啟動延遲時間 │
├────────────┼──────────────┤
│#18, #17 │目標地址Ⅰ │
├────────────┼──────────────┤
│#20. #19 │運行速度Ⅰ │
├────────────┼─────┬────────┤
│#25 b8 │運行指令 │1速定位運行開始 │
├────────────┼─────┴────────┤
│#54, #53 │目標地址變更值 │
├────────────┼──────────────┤
│#56, #55 │運行速度變更值 │
└────────────┴──────────────┘
===================1速定位運行時的注意事項===================
向目標位置的移動量較小時的動作
移動量(目標地址Ⅰ)所需時間比加減速需要的時間短時,實際運行速度不會達到運行速度Ⅰ。
本頁關鍵詞:1速定位,三菱PLC定位模塊